






2015-2016
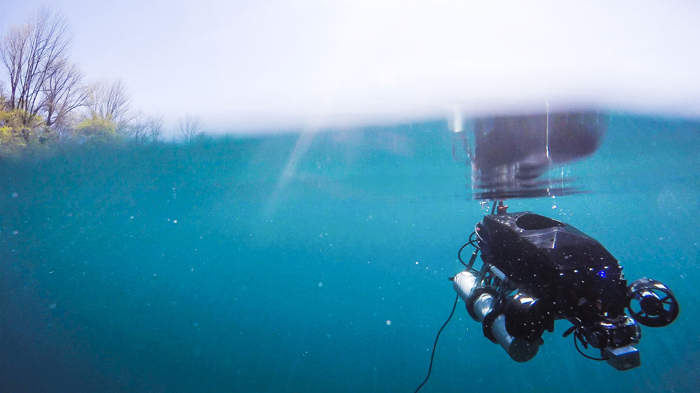
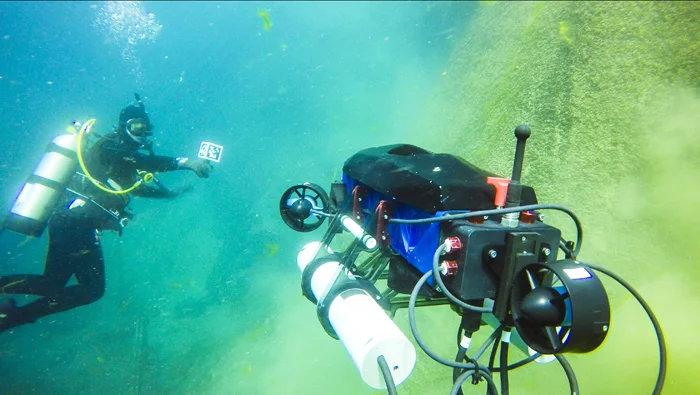
SCUBAssist is an underwater robotic vehicle that assists divers by scouting dive sites and recording well framed and stabilized video. The vehicle can be controlled in two modes: Manual and Autonomous. Manual mode allows the operator to control the vehicle from the surface using a joystick to observe underwater. Switching to autonomous mode, the vehicle tracks divers using computer vision.
With a senior design team of 5, this vehicle was designed, built, and tested over the course of one school year.
I was primarily responsible for the design, analysis, and fabrication of the vehicle, internal electronics, and custom circuit boards.
The pressure vessel was machined from a single aluminum tubular extrusion and includes mounting features and seals machined into the single part. A front and rear electronics rack allow for easy assembly and removal for debugging and development.
Awards:
First Place: Intel Cornell Cup
Second Place: University of Pennsylvania SEAS Design Competition Francis G. Tatnall Prize